

面向地图匹配研究的浮动车GPS开放数据介绍
浮动车(Floating Car Data)技术,是近年来国际智能交通系统(ITS)中所采用的采集道路交通数据的先进技术手段之一。其基本原理是:根据装备车载全球定位系统,定期记录浮动车在其行驶过程的车辆位置,方向和速度等信息,获取浮动车GPS数据。此次Open-Data计划开放广州市某实验道路的浮动车GPS 数据及道路地图数据, 以供研究者进行不同类型的地图匹配算法研究。数据可供所有人免费下载使用,这些数据仅限用于非商业用途,且基于开放数据的研究成果必须标注数据由OpenITS提供。
1.地图匹配研究
地图匹配是一项确定车辆在地图上位置的技术,依据GPS车载终端在车辆行驶过程中采集到的车辆GPS定位信息,通过特定模型和算法,将车辆的当前位置与电子地图上的道路相关联。
1.1多类型地图匹配算法
- 实时地图匹配:实时地图匹配的主要应用场景是导航,此类应用对算法的匹配效率要求高,匹配精度与另外两类地图匹配技术相比较低。
- 准实时地图匹配:准实时地图匹配主要用于交通信息发布,此类应用在进行匹配时允许存在一定延时,需要合理设计算法流程,在保证一定匹配效率的基础上尽量提高匹配精度。
- 离线地图匹配:用于城市规划或政策制定,此类应用对算法的匹配效率要求不高,匹配精度取决于GPS采样频率与算法本身。
1.2算法评价指标
定义两个指标用来评价地图匹配算法,分别为道路匹配率和平均延误时间。
1.2.1道路匹配率
1.2.2平均延误时间
2. 数据采集
本次Open-Data计划开放广州市某实验道路的浮动车GPS数据集与实验道路地图数据集。其中地图数据集包括实验道路及周边200米范围内的电子地图,浮动车GPS数据集指分别沿着实验路线1和实验路线2经多次采集回来的GPS数据。
实验道路如图2-1所示。全长18598m,涵盖12条不同道路及普通道路,高架桥以及下层道路等各类型的道路,其中蓝色标记处为有高架桥的路段,表2-1是编号与高架桥的对应关系。图2-2是实验道路路段划分示意图,不同的编号代表不同的道路,编号与道路名对应关系见表2-2。考虑到实验道路包含高架桥及下层道路,根据高架桥与下层道路的分布,设计了两条轨迹相同但路径不同的实验路线,乘坐出租车分别沿实验路线行驶,使用外置GPS模块采集到了两个数据集。数据集是以1s为采样间隔,因此可以抽稀为任意时间间隔的数据,以满足不同的实验需求。

表2-1 编号与高架路对应关系
|
编号 |
高架名 |
|
1 |
工业大道 |
|
2 |
内环路A线(高架1) |
|
3 |
内环路A线(高架2) |
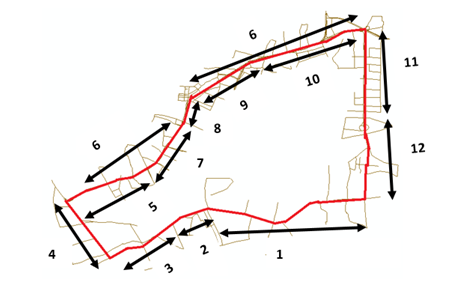
表2-2 路段编号与路名的对应关系
|
编号 |
道路名 |
|
1 |
新港西路 |
|
2 |
昌岗东路 |
|
3 |
昌岗中路 |
|
4 |
工业大道北 |
|
5 |
南田路 |
|
6 |
内环路A线(高架) |
|
7 |
江湾路 |
|
8 |
江湾桥 |
|
9 |
东华南路 |
|
10 |
中山一路 |
|
11 |
广州大道中 |
|
12 |
广州大道南 |
2.1 Data-Set 1
Data-Set 1 包含沿实验路线1行驶6次采集的GPS数据,采集日期均为工作日。
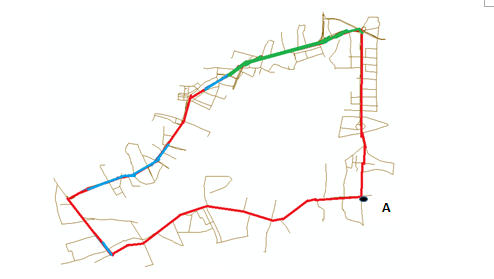
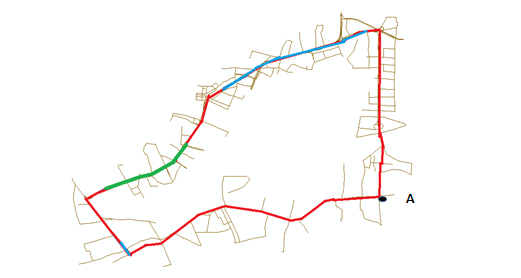
实验路线1:新港西路-昌岗东路-昌岗中路-工业大道北-南田路-江湾路-江湾大桥-东华南路-内环路A线(高架2)-广州大道中-广州大道南。如图2-3所示,红色是实验路线1经过的普通道路部分,蓝色是实验路线1经过下层道路的部分,绿色是实验路线1经过高架桥的部分。从A点出发,沿顺时针方向。
2.2 Data-Set 2
Data-Set 2包含沿实验路线2行驶6次采集的GPS数据,采集日期均为工作日。
实验路线2:新港西路-昌岗东路-昌岗中路-工业大道北-南田路A线入口(匝道)-内环路A线(高架1)-江湾路-江湾大桥-东华南路-中山一路-广州大道中-广州大道南。如图3-4所示,红色是实验路线2经过的普通道路部分,蓝色是实验路线2经过下层道路的部分,绿色是实验路线2经过高架桥的部分。从A点出发,沿顺时针方向。
3.开放数据介绍
3.1地图数据介绍
此次Open-Data计划提供实验道路及周边200米范围内的电子地图,地图数据信息以shapefile的格式开放,可直接通过ARCGIS打开,包含了道路名称(NAME)、道路类型(ROADTYPE)等道路信息以及道路间的拓扑关系。可以直接用做地图匹配的道路图层。图3-1是地图数据的样例,字段具体说明可见表3-1。
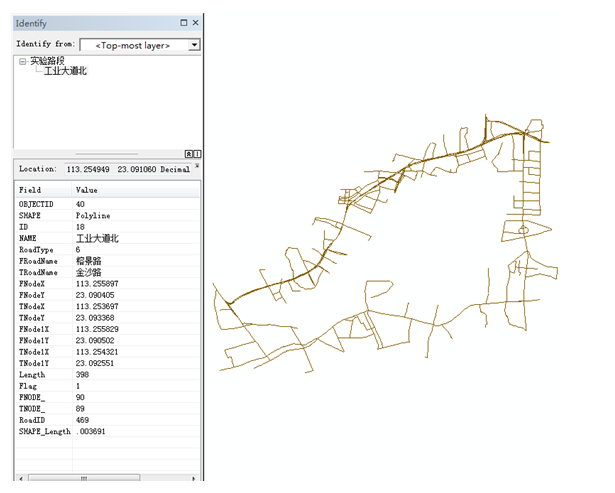
表3-1 地图数据各字段说明
|
字段名 |
数据类型 |
字段说明 |
|
OBJECTID |
对象ID |
地图对象编号 |
|
SHAPE |
几何 |
地图对象类型 |
|
ID |
对象ID |
地图对象编号 |
|
NAME |
文本 |
道路名称 |
|
RoadType |
文本 |
道路类型 |
|
FRoadName |
文本 |
道路起点名称 |
|
TRoadName |
文本 |
道路终点名称 |
|
FNodeX |
文本 |
道路起点的经度 |
|
FNodeY |
文本 |
道路起点的纬度 |
|
TNodeX |
文本 |
道路终点的经度 |
|
TNodeY |
文本 |
道路终点的纬度 |
|
FNode1X |
文本 |
离道路起点最近一个点的经度 |
|
FNode1Y |
文本 |
离道路起点最近一个点的纬度 |
|
TNode1X |
文本 |
离道路终点最近一个点的经度 |
|
TNode1Y |
文本 |
离道路终点最近一个点的纬度 |
|
Length |
文本 |
道路长度,单位:米 |
|
Flag |
文本 |
ARCGIS自动生成编号 |
|
FNODE_ |
文本 |
路段起始节点ID |
|
TNODE_ |
文本 |
路段终点节点ID |
|
RoadID |
文本 |
道路编号 |
|
SHAPE_Length |
文本 |
SHAPE的长度 |
3.2 浮动车GPS数据介绍
依照两条实验路线,经过多次路线重复的采集,实验路线1和实验路线2分别获得6组浮动车GPS数据,数据包含了时间(TIME)、经纬度(LONGTITUDE/LATITUDE)、速度(SPEED)、航向(HEADING)、卫星数(NUM)信息。图3-2为GPS数据样例,各个字段的具体说明见表3-2。
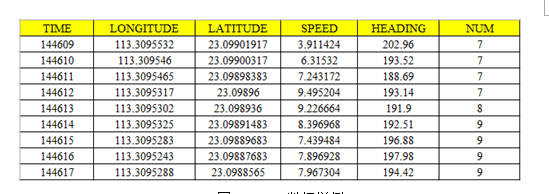
表3-2 GPS数据字段说明
|
字段名 |
数据类型 |
字段说明 |
|
TIME |
文本 |
收到GPS信号的标准卫星时间,格式为hhmmss(时分秒) |
|
LONGITUDE |
文本 |
经度,车辆经纬度的坐标系是WGS84的地球坐标。 |
|
LATIDUDE |
文本 |
纬度,同上 |
|
SPEED |
文本 |
车辆瞬时速度,单位为(km/h) |
|
HEADING |
文本 |
航向,即车辆行驶方向与正北方向的夹角,车辆静止时为空 |
|
NUM |
文本 |
卫星数 |
4参考文献
[1] Zhao-cheng He, She Xi-wei, Li-jian Zhuang, Pei-lin Nie. On-line map-matching framework for floating car data with low sampling rate in urban road networks [J]. Intelligent Transport Systems, 2013,404-414.
[2] NEWSON P, KRUMM J. Hidden Markov map matching through noise and sparseness [C]. Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, 2009.
[3] Velaga N R, Quddus M A, Bristow A L. Developing an enhanced weight-based topological map-matching algorithm for intelligent transport systems[J]. Transportation Research Part C: Emerging Technologies, 2009, 17(6): 672-683.
引文格式(Citation Reference):
中文引文格式如下,时间信息请按实际情况更改。
OpenITS联盟 OpenData OpenData V4.0-面向地图匹配研究的浮动车GPS开放数据 https://www.openits.cn/openData2/570.jhtml (2021). Accessed: 2021-XX-XX
Please change the accessed data accordingly.
OpenITS Org. OpenData V4.0-GPS floating car open data for map matching research https://www.openits.cn/openData2/570.jhtml (2021). Accessed: 2021-XX-XX

注 :下载数据后解压时请使用除winRAR以外的解压工具进行解压