精准仿真场景描述 |
|
| 时间:2018-10-31 | |
本平台为用户提供了三类数据集文件:avidata、detectordata和probedata,分别对应目前三种主要交通信息采集方式:交叉口电警卡口式个体车辆检测、定点检测线圈采集和浮动车移动采集。用户可根据需要提取不同时段、不同集计程度或不同检测率的数据集。
一、场景介绍
本平台提供的数据为“精准仿真”场景下的仿真结果。
1. 精准仿真场景构建
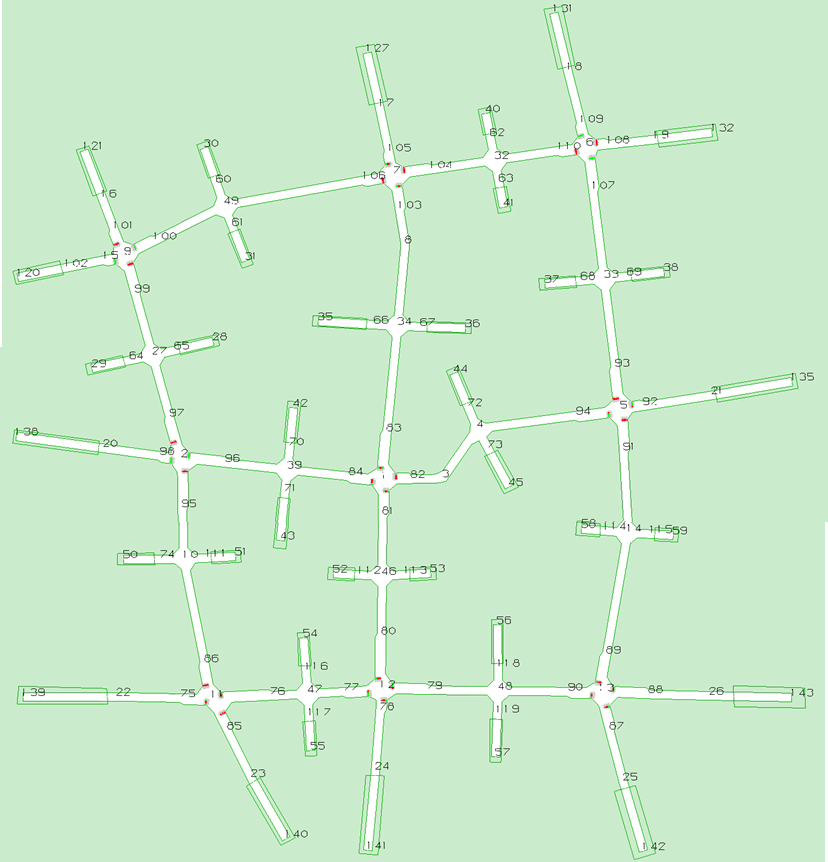
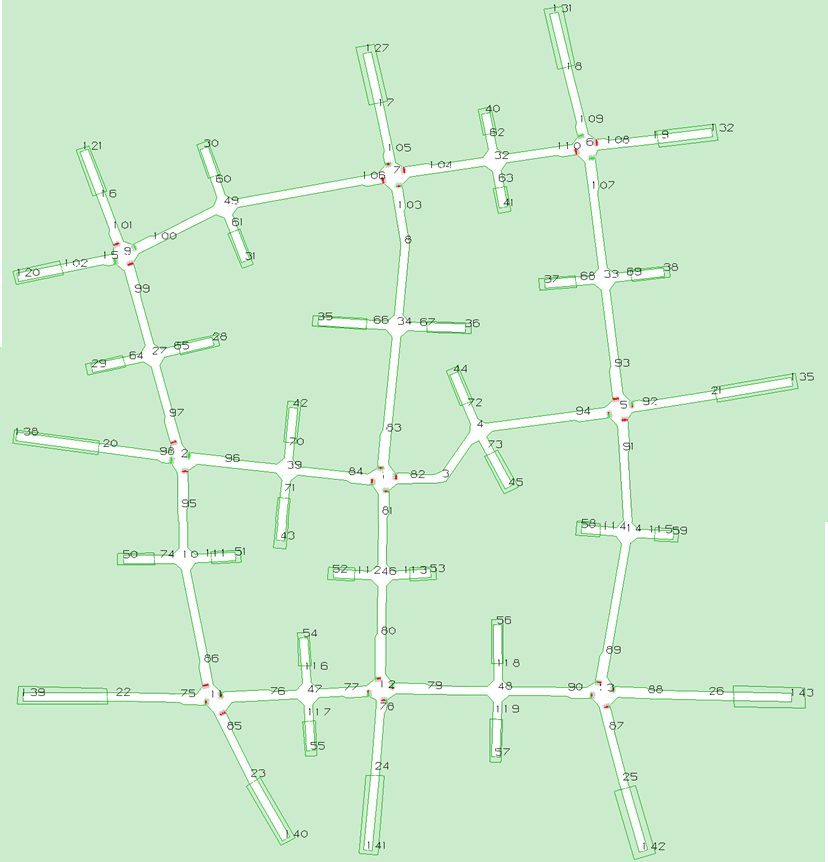
通过交叉口电警卡口车辆检测设备和信号机设备,获得实时交叉口过车信息和信控方案,作为标定好的paramics微观仿真软件的输入,从而构造一种“精准仿真”场景。相比于以路网OD对或路径作为仿真对象的传统仿真场景,“精准仿真”场景的仿真对象细化到个体车辆,并具有如下特点:准确OD位置(每辆车)、准确出发时刻(每辆车)、准确路径(每辆车)。 为了满足上述精准要求,场景选取了安徽省宣城市中心区9个路口形成的田字形路网作为仿真区域:每个路口均设有电警卡口,数据完备性较高。场景的路网结构如下图所示: 图1 网络地图的路网
图2 Paramics仿真路网 2. 仿真检测器设置
线圈检测器和AVI检测器的位置是:每个路口的四个进口道停车线处、以及各个路中停车场进出口位置。
二、数据集描述
在精准仿真场景中采集的仿真数据及其表结构说明,见如下附件 |